Projects
Here is a list of some selected projects I have completed. These projects touch on mobile robots, quadrotors, and computer vision, among other things.
For more information, visit my Github page .
Avoid the wall
 Autonomous wall detection and avoidance using optical flow
Autonomous wall detection and avoidance using optical flow
Abhinav Modi, Prateek Arora
Given a wall of unknown position and orientation, we developed a feedback system based on dense optical flow estimation using Gunnar Farneback approach to align with the wall and fly above or below it.
Code Video
MountainCar-v0
 Deep Q-learning for the Mountain-Car-v0 in OpenAI gym
Deep Q-learning for the Mountain-Car-v0 in OpenAI gym
Abhinav Modi
Trained a neural network using pytorch framework to perform deep Q-learning for the continuous state, discrete action-space mountain-car problem in the OpenAI gym environment.
Code
HODM
 Human Obstacle Detection Module
Human Obstacle Detection Module
Abhinav Modi, Kartik Madhira
Using software development principles - Agile Iterative Process we developed a package using a pretrained YOLOv3 network to detect humans in a sequence of input images.
Code
MyAutoPano
 Panorama stitching using Traditional Supervised and Unsupervised Approaches
Panorama stitching using Traditional Supervised and Unsupervised Approaches
Abhinav Modi, Kartik Madhira and Prateek Arora
In this project we have used Homography to warp multiple images and stitch a panorama using three different techniques- Traditional approach using feature matching and RANSAC, Supervised approach to predict a 4 point parametrization of Homography between two images and an Unsupervised approach to predict Homography from the 4pt parametrization without the presence of a ground truth.
Code
Augmented Reality Tags
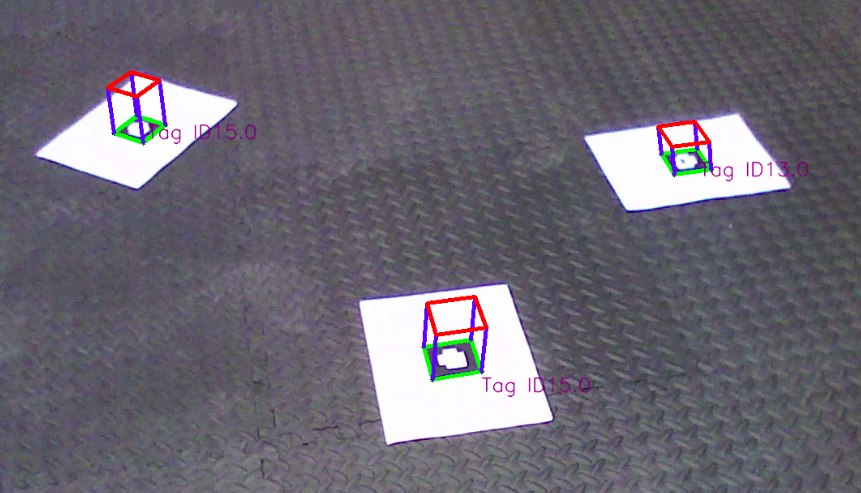 AR Tag detection and tracking, to project a 3D Cube in a video sequence
AR Tag detection and tracking, to project a 3D Cube in a video sequence
Abhinav Modi, Kamakshi Jain and Rohan Singh
Blob detection is used to detect three encoded(ID and orientation) tags which is followed by the use of homography and then perspective warping to project a cube on each tag based on its ID and orientation.
Code Video
PB-Lite
 Edge Detection using a modified Probability of Boundary Method
Edge Detection using a modified Probability of Boundary Method
Abhinav Modi
The algorithm uses DoG, Leung-malik and Gabor filter Banks to generate texture, brightness and color maps to improve the boundary detection results of Canny and Sobel baselines.
Code
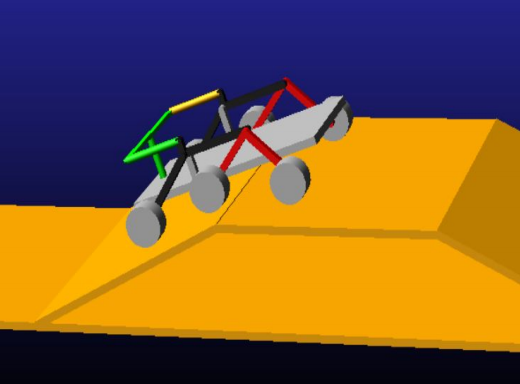
WALLE 2.0
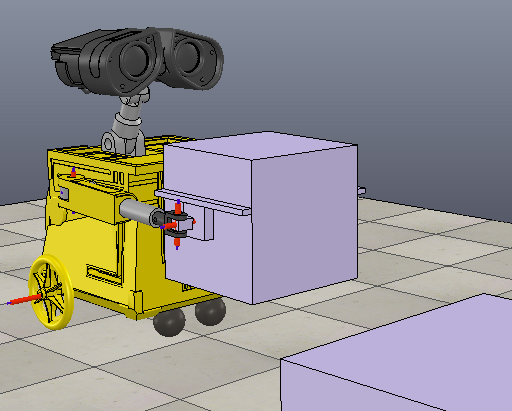 Forward and Inverse Kinematic Modelling of a Mobile Manipulator Robot: WALLE
Forward and Inverse Kinematic Modelling of a Mobile Manipulator Robot: WALLE
Abhinav Modi
The main idea of this project was to model the Kinematics of a reduced DOF(Degree of Freedom) model of the robot: WALL-E from the original Disney PIXAR movie: WALL-E. The objective is to perform a pick and lift operation using both the arms together on a mobile base. This will enable the robot to pick a box full of supplies, kept at fixed distance which is more than one arms reach.
Video
Finding Shortest Path
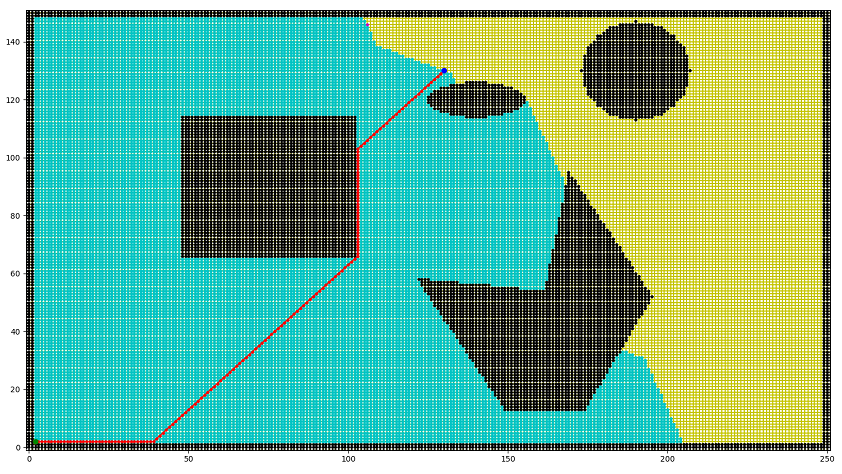 A-star and Dijkstra algorithms for a point robot and a rigid robot.
A-star and Dijkstra algorithms for a point robot and a rigid robot.
Abhinav Modi
Implemented A-star and Dijkstra algorithms for a point robot and a circular rigid robot of arbitrary radius on a given map.
Code
BIOBOT
 PLSS Rover capable of carrying one crew only
PLSS Rover capable of carrying one crew only
Abhinav Modi, Hanish Mehta and Rohan Singh
The BIOBOT is a conceptual model of a one-crew carrying, semi-autonomous Lunar-Rover. The rover follows the astronaut with an on-board Life Support System such that astronaut can carry out extra-vehicular activities like sample collection with ease.
Video
Cable Suspended Load from a Quadrotor
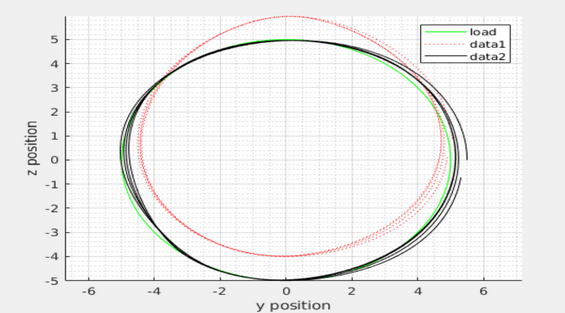 Trajectory Generation and Control of a Quadrotor with a Cable-Suspended Load: A Differentially-Flat Hybrid System
Trajectory Generation and Control of a Quadrotor with a Cable-Suspended Load: A Differentially-Flat Hybrid System
Abhinav Modi
*Equal contribution
Code